Machine learning for a miniature robotic unicycle
Eric Wieser (efw27@)
MEng. Project 2016-2017
Supervised by Prof. Carl Rasmussen (cer54@)
Project goals
Balance this unicycle
Fix problems identified in previous work
Review source code and fix bugs found
Improve the tools to make similar projects easier in future
Outline
- System overview
- Summary of the method, Pilco
- Errors in earlier work
- Suggested improvements from earlier work
- Results on the hardware
- Future work and conclusions
System overview
Robot
- Small
- Two actuators - drive wheel, horizontal flywheel
- Arduino-like controller
- C++
- Performs no learning
PC
- Takes data from the robot
- Applies methods from the Pilco toolbox (Matlab)
- Sends a new controller to the robot
PilcoProbabilistic Inference for Learning Control
Optimal control finds a policy for a system minimizing a cost function over a horizon
\[ \begin{alignat}{2} \text{find}&& \quad \pi^*(\bm{x}) &= \argmin_{\pi(\bm{x})} J(\bm{x}\tind\cdot, \bm{u}\tind\cdot) \quad \text{where} \quad J(\bm{x}\tind\cdot, \bm{u}\tind\cdot) = \class{c-orange}{\sum_{i=0}^{i=N}} \class{c-purple}{c(\bm{x}\tind{i}, \bm{u}\tind{i})}\quad \\ \label{eq:optimal} \text{st.}&& \quad \class{c-green}{\bm{x}\tind{i+1}} &\class{c-green}{= f(\bm{x}\tind{i}, \bm{u}\tind{i})} \\ \nonumber && \class{c-blue}{\bm{u}\tind{i}} &\class{c-blue}{= \pi(\bm{x}\tind{i})}\, \nonumber \end{alignat} \]Needs a system model — Pilco learns a probabilistic one using Gaussian process regression
\[ \begin{align} \bm{x}\tind{i + 1} - \bm{x}\tind{i} &= \class{c-cyan}{f_j(\bm{z}\tind{i}) \sim \mathrm{GP}(m_j(\bm{z}), K_j(\bm{z}_1, \bm{z}_2))}, & \bm{z}\tind{i} &= \begin{bmatrix}\bm{x}\tind{i} \\ \bm{u}\tind{i}\end{bmatrix} \end{align} \]Gaussian processes
Problems in inherited work
Software Problems
- Incorrect use of Euler angles
- Incorrect integration of gyro — should be $\bm{q}\tind{t_2} = \exp \left(\tfrac{1}{2} \Delta t \bm{\omega}\right) \bm{q}\tind{t_1}$
- Integer overflow in encoder readings
setupint16_t curr_enc, last_enc; int32_t total = 0;
✘ Wrong + undefined behaviourtotal += curr_enc - last_enc;
✘ Undefined behaviortotal += static_cast<int16_t>(curr_enc - last_enc);
✔total += static_cast<int16_t>( static_cast<uint16_t>(curr_enc) - static_cast<uint16_t>(last_enc) );“When the compiler encounters [undefined behaviour] it is legal for it to make demons fly out of your nose”[1]
- Algebraic errors in the loss function
- Use of contraint-violating trajectories to learn dynamics
- Loss function not scaled to small robot
Electrical Problems
 Exposed metal
Exposed metal
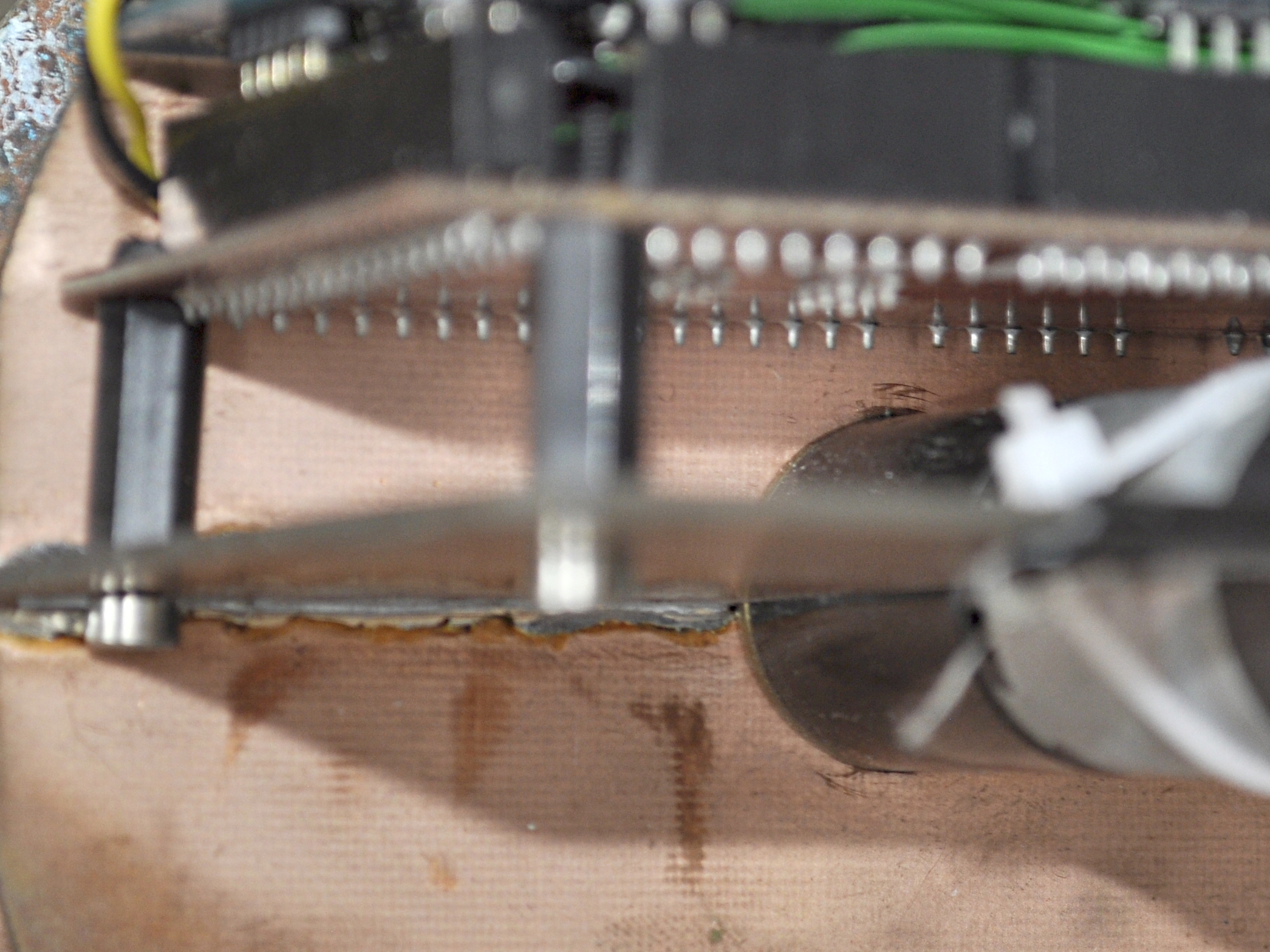 Loose fastening
Loose fastening
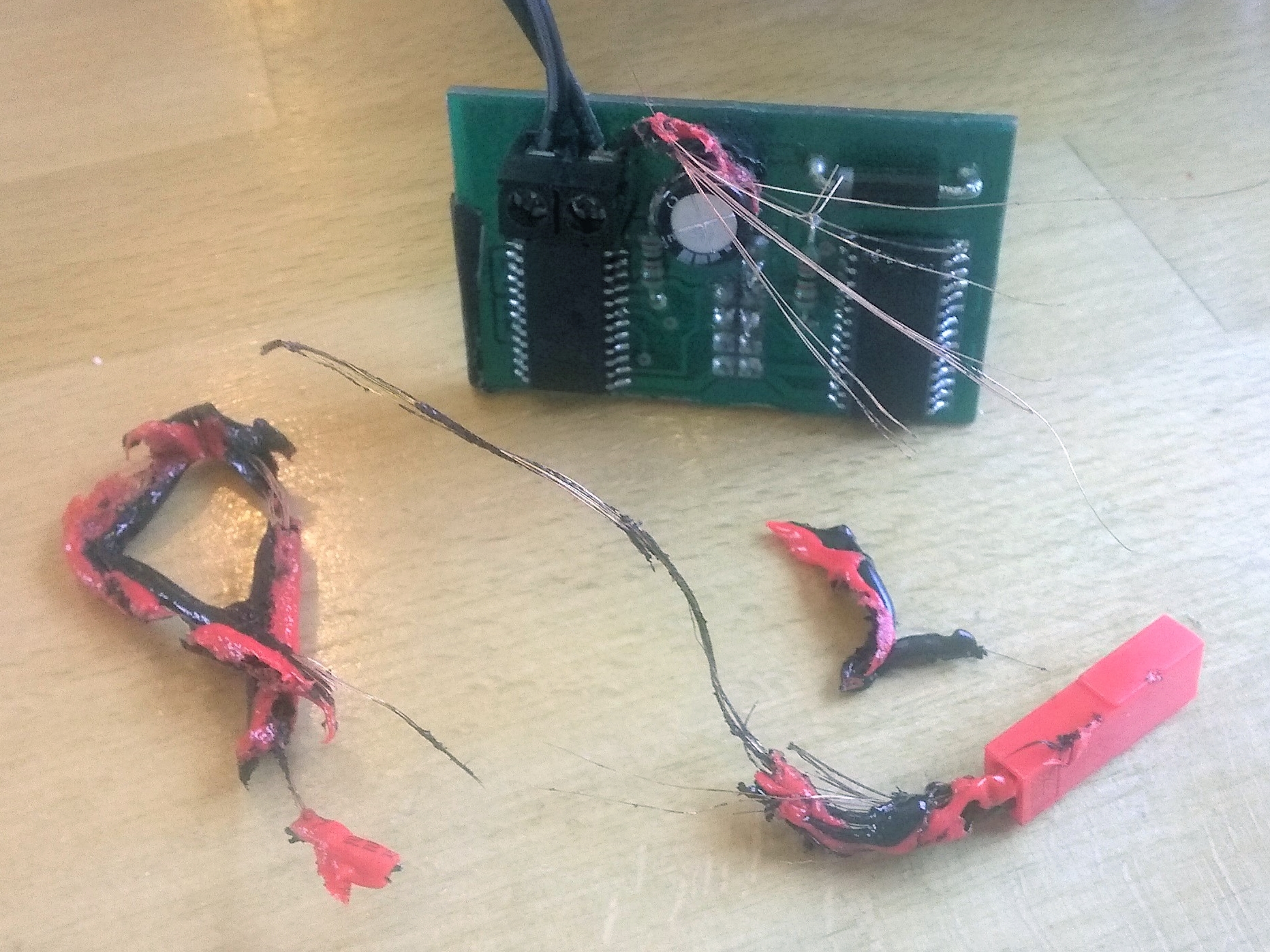 Molten wires
Molten wires
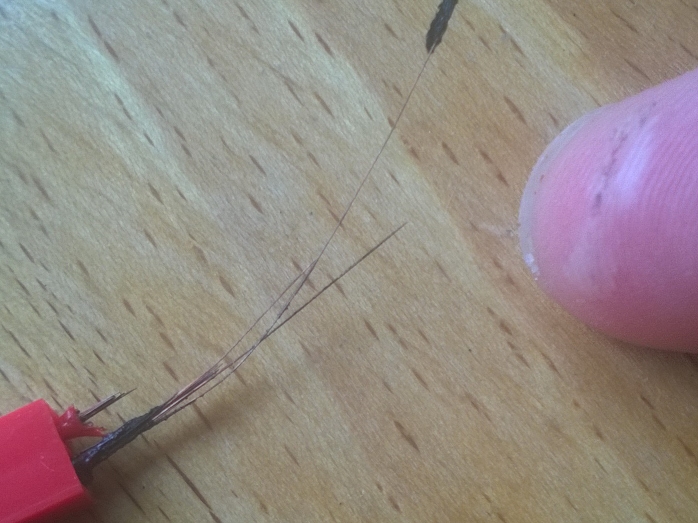 Injury
Injury
Lessons
- Always have a fuse or power switch
- Assume everything is a conductor unless designed not to be
Suggested Improvements
Automate data transfer with the hardware ✔
Improve physical release procedure ✔
Add simulation model of the small unicycle ✔
Redesign the hardware to increase the roll limit ?
Data transfer
Application layer Protocol buffers
syntax = "proto3";
message DebugMessage {
string s = 1;
DebugLevel level = 2;
}
message RobotMessage {
oneof msg {
LogBundle log_bundle = 1;
DebugMessage debug = 2;
LogEntry single_log = 3;
}
}
Framing layer COBS (Consistent Overhead Byte Stuffing)
F1 00 D5 , 0F , C0 FF EE
02 F1 02 D5 00 02 0F 00 04 C0 FF EE 00
Count and null-terminator bytes
Suggested Improvements
Automate data transfer with the hardware ✔
Improve physical release procedure ✔
Add simulation model of the small unicycle ✔
Redesign the hardware to increase the roll limit ?
Physical release procedure
Reaction times
Repeatability of orientation
- Build a rig to drop perfectly ✘ Impractical
- Learn the initial orientation ✘ Must be online
- Measure the initial orientation ✔ Use the accelerometer
Suggested Improvements
Automate data transfer with the hardware ✔
Improve physical release procedure ✔
Add simulation model of the small unicycle ✔
Redesign the hardware to increase the roll limit ?
Simulation models
Software-only tests of Pilco
Only have a model for the 1m unicycle
Approximations of physical parameters good enough
Suggested Improvements
Automate data transfer with the hardware ✔
Measure initial robot orientation accelerometer ✔
Add simulation model of the small unicycle ✔
Redesign the hardware to increase the roll limit ?
Effect of roll limit
Suggested Improvements
Automate data transfer with the hardware ✔
Measure initial robot orientation accelerometer ✔
Add simulation model of the small unicycle ✔
Redesign the hardware to increase the roll limit ?
✘ Improvement is small after fixing the loss functionHardware results
Summary
- Designed and implemented a communication protocol (library published at packetio.readthedocs.io)
- Resolved extensive problems with the current software and hardware stack
- Achieved improved controller performance in simulation.
- Was ultimately unsuccessful in balancing the real robot
Future work
- Investigate why learning failed experimentally
- Use Automatic Differentation within Pilco
Deriving gradients manually
"restricts the [ML] community to only using computational structures we are capable of manually deriving gradients for"
Justin Domke. Automatic Differentiation: The most criminally underused tool in the po- tential machine learning toolbox? 2009-02-17 - Apply a quadratic controller
Quadratic controller
Areas are shaded where $\tau > 0$ and $\tau < 0$. $\tau_w > 0$ corresponds to a force driving the robot forwards, and $\tau_t > 0$ corresponds to a moment rotating the robot clockwise.
Links to resources
Embedded code Matlab code Final report This presentation (https://eric-wieser.github.io/masters-presentation)